
























作品詳情
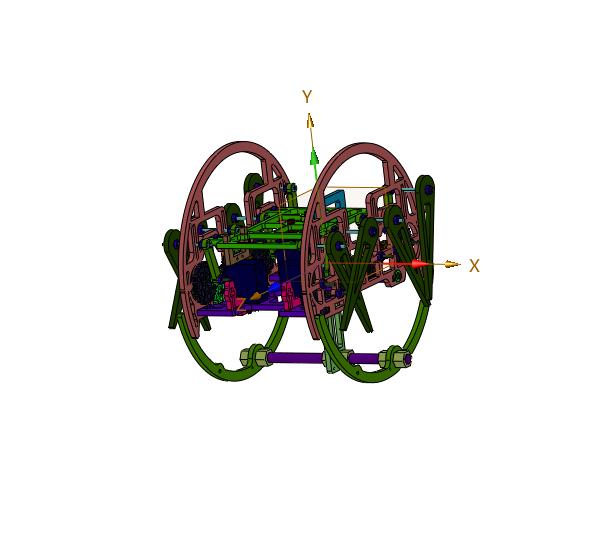
動物學(xué)習(xí)步行滾動機器人在技術(shù)層面涉及機器人技術(shù)與生物模擬技術(shù)的深度融合。機器人通過模擬動物的行走與滾動行為,實現(xiàn)復(fù)雜環(huán)境下的高效移動。這一過程包括深度分析動物步態(tài)的生物力學(xué)特性,以及將這些特性轉(zhuǎn)化為機器人的運動控制策略。同時,機器人通過學(xué)習(xí)動物的行走模式,提高其適應(yīng)地形變化的能力與行走效率。這一技術(shù)的實現(xiàn)不僅涉及機械工程、電子工程,還需融合生物學(xué)、控制理論等多學(xué)科知識。



平diy桌面級快速成型3D打印機")

電機4軸高精度自動化機械臂")


動臺袋子印畫設(shè)備")










